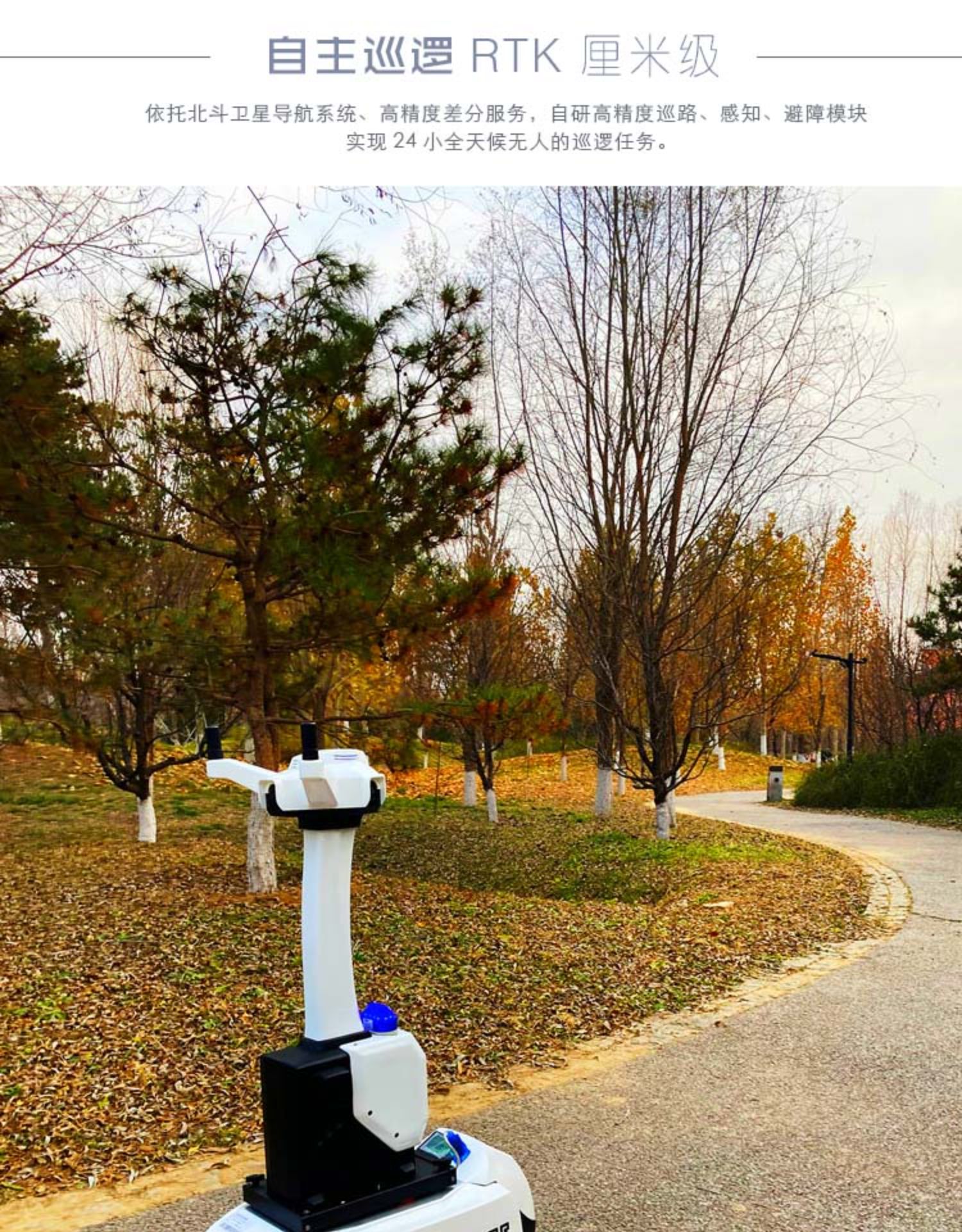
Autolabor PM1是由清华大学无人车团队搭载的一款远程安防巡逻平台,包含巡逻机器人、远程驾驶台云端管理系统,已实现了4G/5G/Wi-Fi远程驾驶、实时高清图像传输、远程对话、语音提醒等功能。










产品清单
| PM1 移动平台 | 1个 |
| 充电器 | 1个 |
| 控制手柄(含电池) | 1个 |
| 串口数据线 | 1个 |
软件清单
- Autolabor PM1 Starter 控制软件 (Windows)
- Autolabor PM1 SDK 原生 (C++)
- Autolabor PM1 SDK .Net (C#)
- Autolabor PM1 SDK .Net Nuget 包 (C#)
- Autolabor PM1 SDK ROS (C++)
产品参数
| 尺寸 | 750*520*1150mm |
|---|---|
| 重量 | 45kg |
| 通过性 | < 50mm |
| 最大坡度 | 15° |
| 行驶速度 | 1m/s |
| 驱动轮直径 | 150mm |
| 运动模式 | 三轮差动 |
| 续航小时 | 5小时 |
|---|---|
| 充满时间 | 4小时 |
| 屏幕尺寸 | 3*24寸 |
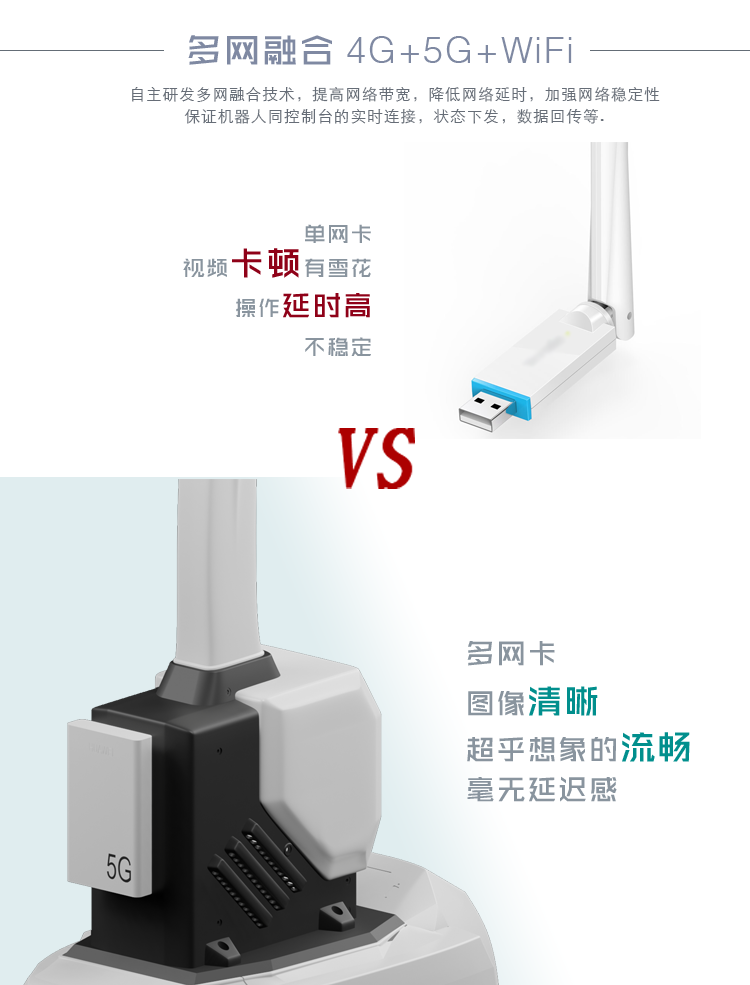
| 通讯模块 | 4G+5G |
| 摄像头 | 4*1080p |
| 激光雷达 | 前后单线激光雷达 |
| 传感器 | 定位模块:GPS+IMU |
Autolabor PC
| 内存 | 8GB |
|---|---|
| 硬盘 | 128G M.2高速固态硬盘 |
| CPU | Intel i5-9400F 6核6线程 主频2.9GHz |
| 主板 | H310全固态主板 |
|---|---|
| 内存 | DDR4 4G*2 |
| 显卡 | GTX1050Ti 4G |
显示器
| 数量 | 3 |
|---|---|
| 屏幕尺寸 | 23.8英寸 |
| 分辨率 | 1920*1080 |
|---|---|
| 接口 | 音频 HDMI DP USB |
方向盘
| 品牌 | 罗技G29 |
|---|---|
| 旋转角度 | 900° |
| 力回馈技术 | 双马达齿轮传动 |
| 方向盘分辨率 | 65536 |
| 方向盘材质 | 真皮包裹 |
|---|---|
| 方向盘重量 | 2.25Kg |
| 踏板重量 | 3.1Kg |
| 踏板材质 | 可调节金属踏板 |