无人驾驶 - 中国智能汽车大赛(CIVC 2017)
微型无人驾驶汽车实验平台,采用GPS与多线激光雷达等组合导航,完成导航任务。

自动驾驶汽车测试系统 - 多目标协同运动控制研究 - 清华大学
以移动机器人平台模拟真实汽车,设计移动单元协同控制算法。

机器人地空协同控制研究- 深圳大学
转换无人机获取的航空影像,发送至地面无人车执行导航任务。

基于脑机接口的脑控车辆研究- 东南大学
将人脑神经活动转化控制指令,控制机器人运动。

果园机器人自主避障策略研究- 河南科技大学
使用视觉与激光雷达采集果园环境,进行避障策略研究,完成果园机器人自主作业。

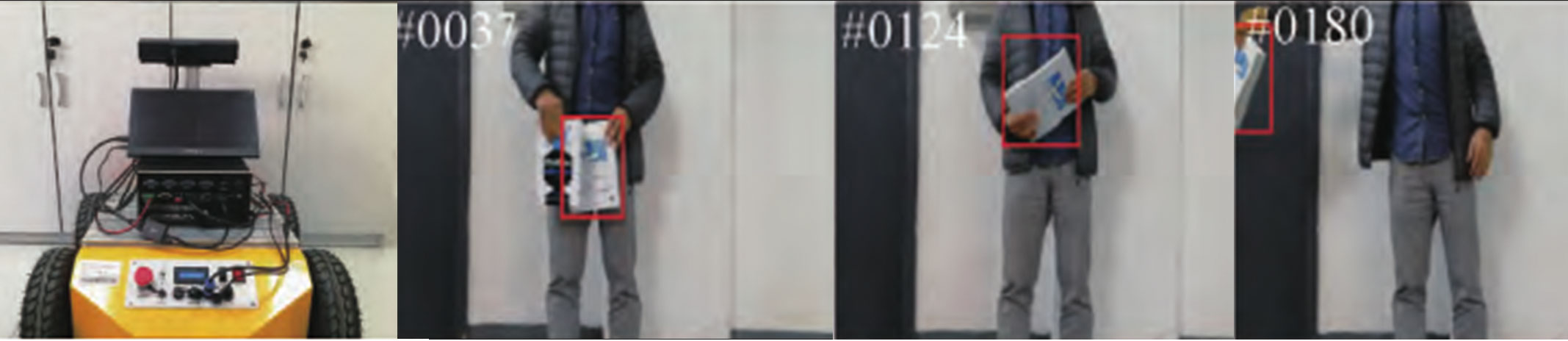
目标跟踪 – 湖南大学
在机器人平台上验证目标跟踪算法,能有效跟踪复杂场景的目标,且满足实时要求。
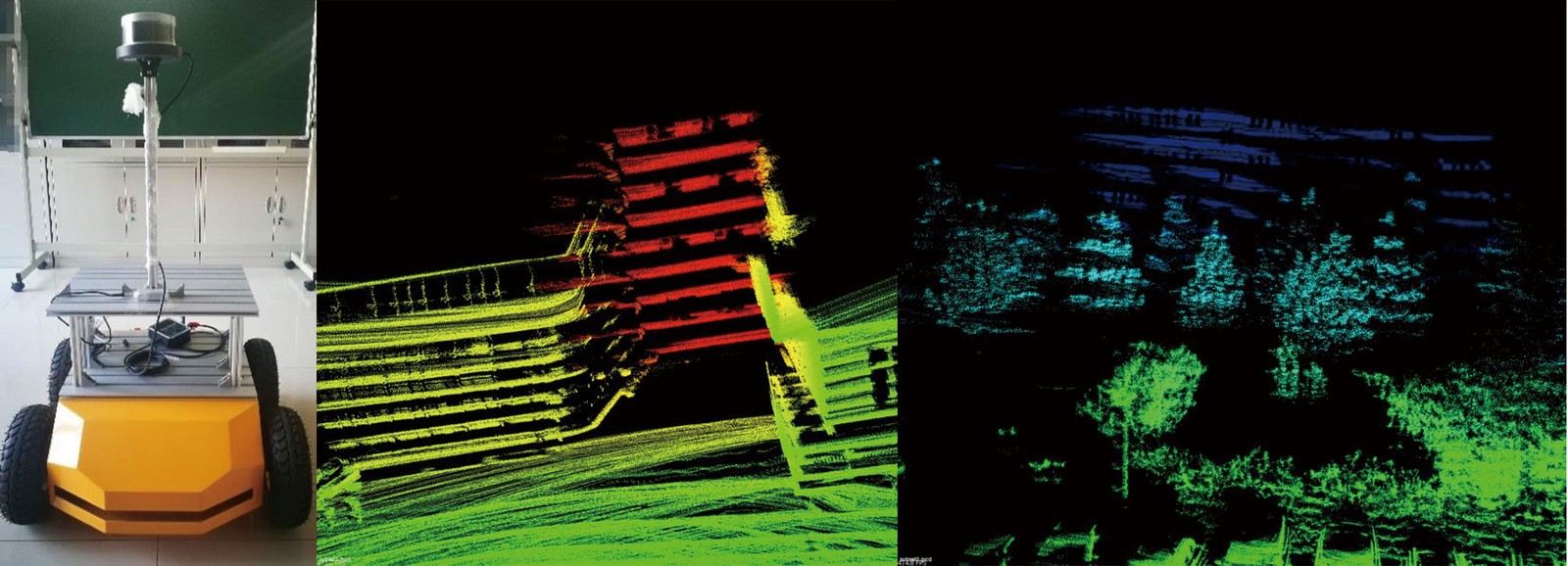
基于图优化的轮式机器人三维建图研究- 中科院国家空间科学中心
使用轮式机器人进行三维地图构建与优化,实现了高精度三维建图。
基于四轮差速轮式机器人的路径追踪算法研究 – 东北大学
利用组合导航系统记录车辆的实时定位和跟踪点,提出一种优化目标路径的方法。

基于强化学习的机器人全局路径规划算法研究 - 西湖大学
针对机器人导航,提出一种更优的基于强化学习的路径规划算法。
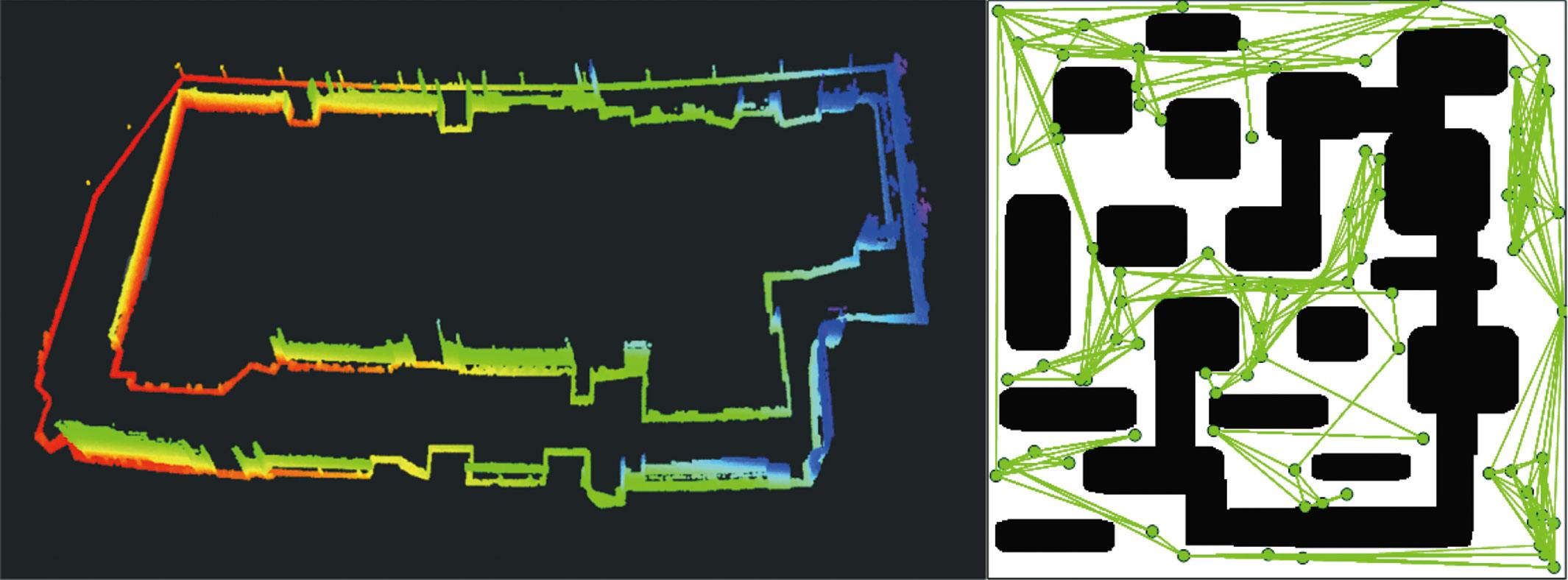
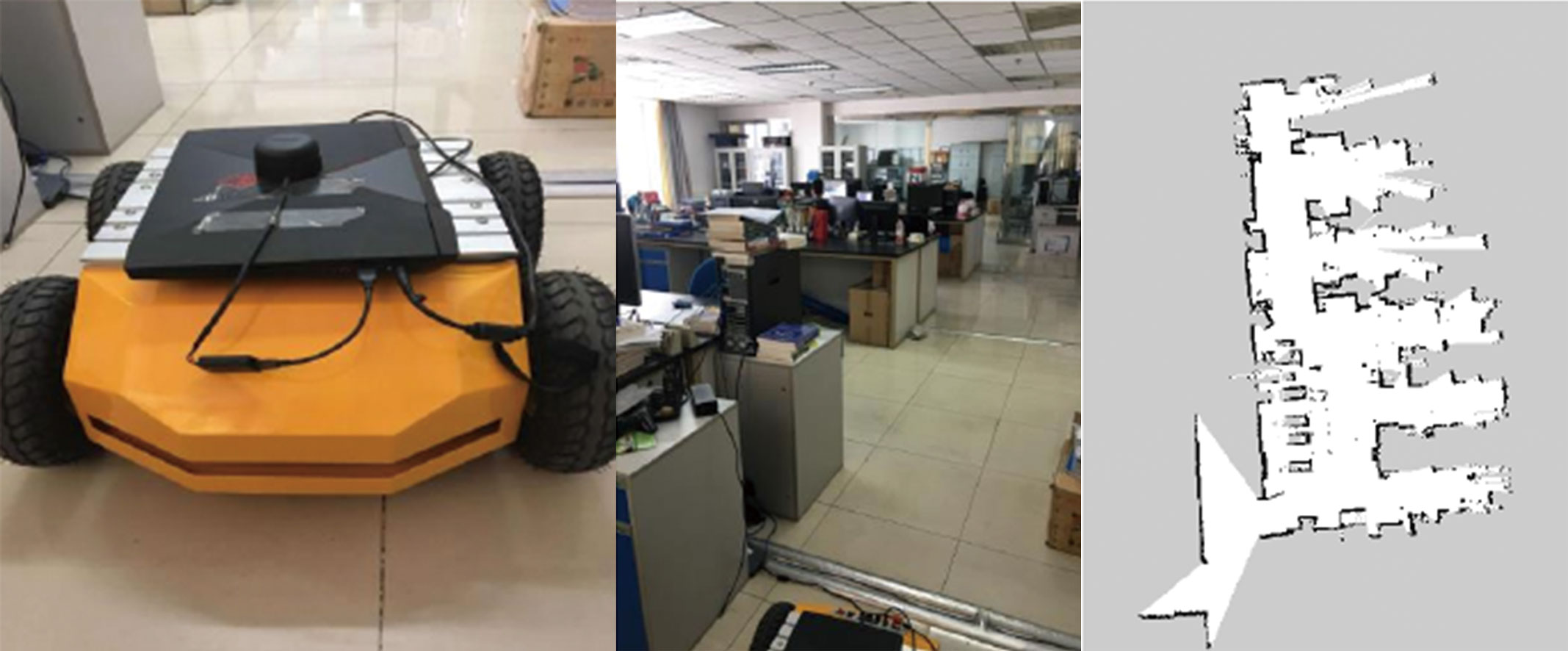
基于SLAM的机器人定位导航技术研究- 中科院国家空间科学中心
以轮式机器人为实验平台,设计实现了基于SLAM的自主导航软件系统。
基于Autolabor机器人发表的论文

Autolabor 智能导航机器人
适用于教学、科研、竞赛的智能移动机器人平台,平台集成度高、上手快、全开源、扩展性强、支持ROS。
教育 Education
科研 Research
竞赛 Competition
产品介绍
硬件
- 整机分为底盘、控制电脑、激光雷达、深度相机、定位标签、5G 通信组几大模块
- 模块化设计,各模块独立、拆装方便
- 预留接口,可扩展安装GPS、惯导、超声波、红外热像仪、温湿度传感器、云台、机械臂等设备
软件
- 定制化 Autolabor OS 机器人操作系统,全部开源
- 包含完整的机器人感知、认知、决策、控制几大核心模块应用
- 支持机器人关键技术研究,如多传感器信息融合技术、导航与定位、路径规划、机器人视觉、智能控制、人机接口等
- 包含有即时定位与地图构建、路径规划、定位导航中的主流算法
- 已实现室内外自动导航、5G远程控制、自主路径规划、自动循迹、智能避障等功能

